Force Feedback Trackball: Vortex4Avango Examples
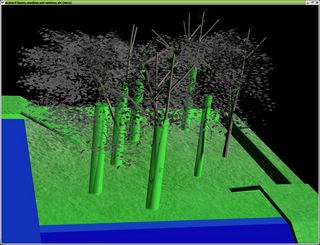

In der Applikation besteht ein Objekt aus der sichtbaren Geometrie und dem nicht sichtbaren Körper. Die Geometrie dient der Visualisierung des Objekts, also das, was man eigentlich sieht. Dazu wird mit Hilfe des fpLoadFile-Knoten ein beliebiges Modell geladen, nach den Bedürfnissen transformiert und der Szene hinzugefügt. Der Körper ist die physikalische Repräsentation innerhalb der Simulation. Nur dieser Teil wird von der Vortex-Engine benutzt, um Kollision, Bewegung etc. des Objekts zu berechnen. Im Idealfall sind Geometrie und Körper deckungsgleich. Oft genügt es allerdings, Vereinfachungen der Geometrie zu nutzen, um die Engine nicht mit Berechnungen zu überlasten.
Die Bewegung von Objekten in physikalisch korrekt simulierten Umgebungen erfolgt nicht durch die Transformation der Geometrie, sondern durch das Wirken von spezifischen Kräften auf den Körper. Die Geometrie folgt dann dem Körper.