Kamera-Positionsbestimmung mittels Deep Learning für die Brückeninspektion
Kai Gerrit Lünsdorf
(Prof. Dr.-Ing. Volker Rodehorst, PD Dr. Andreas Jakoby, Christian Benz)
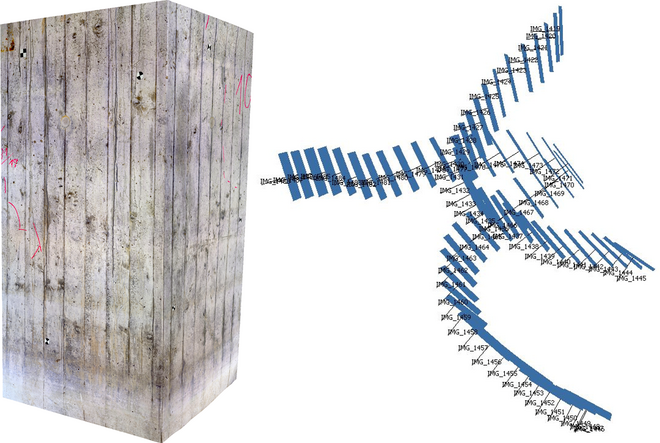
Die Bestimmung der Kameraposition ist eine der ältesten und wichtigsten Aufgaben in Computer Vision. In den letzten zehn Jahren hat die Entwicklung im Bereich des Deep Learning zu neuen Ansätzen zur Lösung dieser Aufgabe geführt. Diese sind in der Lage, eine Position in Echtzeit aus einem einzigen Bild zu schätzen und benötigen weniger Rechenleistung. In dieser Masterarbeit wählen wir das vielversprechendste neuronale Netzwerk für die Regression der Kameraposition in Echtzeit aus einem Einzelbild aus und bewerten es im Kontext der Brückeninspektion mit unbemannten Flugsystemen (UAS). Das neuronale Netz wird anhand von zwei Referenzdatensätzen und einem Evaluierungsdatensatz, der den Anwendungsfall abdeckt, bewertet. Der Evaluierungsdatensatz wurde im Rahmen dieser Arbeit unter Verwendung eines Modells eines Brückenpfeilers erstellt. Die experimentellen Ergebnisse zeigen, dass das evaluierte neuronale Netz im Vergleich zu handelsüblichen globalen Satellitennavigationssystemen (GNSS) genauere Positionen schätzt. Die Erkenntnisse aus dem Experiment zeigen Eigenschaften und Grenzen des evaluierten Netzwerks. Wir kommen zu dem Schluss, dass das evaluierte neuronale Netz als Unterstützung für GNSS und auch als Alternative während einer Inspektion verwendet werden kann, wenn GNSS-Signale durch die Brücke selbst blockiert werden, aber es scheint noch nicht die Genauigkeit von Methoden wie Structure from Motion (SfM) zu erreichen.