Deep Learning-based Camera Pose Regression for Bridge Inspection
Kai Gerrit Lünsdorf
(Prof. Dr.-Ing. Volker Rodehorst, PD Dr. Andreas Jakoby, Christian Benz)
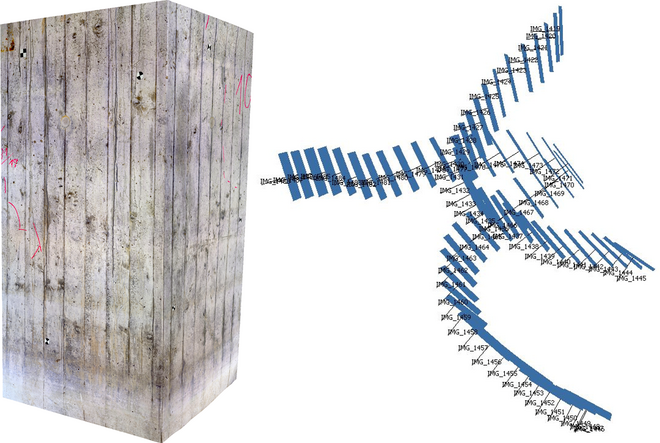
Determining a camera's pose is one of the oldest and most important tasks in computer vision. Over the last decade, the development in deep learning led to new approaches to solve this task. These are capable of estimating a pose in real-time from a single image and require less computational power. In this Master’s thesis, we select the most promising state-of-the-art neural network for real-time camera pose regression from a single image and evaluate it in the context of bridge inspection with unmanned aircraft systems (UAS). The neural network is evaluated on two reference datasets and on an evaluation dataset, covering the use case. The evaluation dataset was created in the scope of this thesis using a mockup of a bridge's pillar. The experimental results show that the evaluated neural network estimates more accurate positions compared to off-the-shelf global navigation satellite system (GNSS). The insights from the experiment show properties and limitations of the evaluated network. We conclude that the evaluated neural network can be used to assist GNSS and also as an alternative during an inspection, when GNSS signals are blocked by the bridge itself, but do not yet seem to reach the accuracy of methods like Structure from Motion (SfM).