Cloudy with a chance of scene understanding (SoSe 2023)
With the advancing development of 3D scanning technologies and LiDAR systems, an increasingly larger amount of point cloud data is being generated. This data holds immense potential for a variety of applications, from autonomous vehicles and robot navigation to the exploration of virtual museums. However, efficiently and accurately analyzing this data remains a challenge.
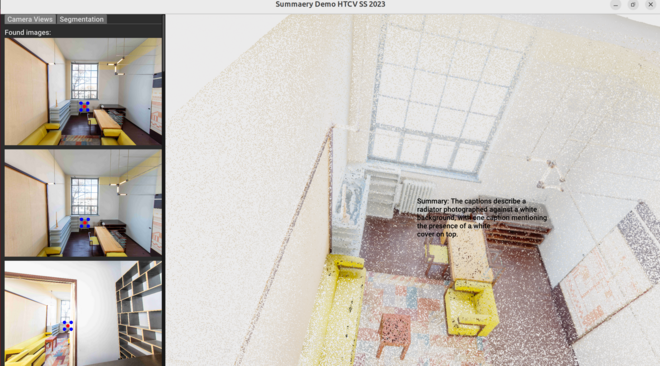
The goal of this project is to explore and develop modern computer vision techniques to efficiently segment point clouds and to apply machine learning algorithms that can identify and label the entities contained therein. Furthermore, the detection and categorization of the relationships between these entities will be explored.
Project workflow:
Literature review: Identification and review of current research methods for point cloud segmentation and classification in conjunction with modern large language models
Data collection: Gathering and preprocessing of point cloud data from various sources for model training and validation
Development of segmentation algorithms: Exploration and adaptation of deep learning models for point cloud segmentation
Entity recognition: Implementation of algorithms to detect and label entities within the segmented data
Relationship analysis: Exploration of methods to detect and represent relationships between the identified entities
Validation & testing: Review of the developed models and algorithms using test datasets and adjustments based on the outcomes
Documentation & presentation: Summarizing the research findings and presenting the developed models and methodologies
This project offers students the opportunity to gain hands-on experience in the areas of computer vision, machine learning, and 3D data processing, and to contribute to the current research projects of the department.