Sensor fusion with extended Kalman filter for UAS navigation
Frederic Gaillard
(Prof. Dr.-Ing. Volker Rodehorst, Jun.-Prof. Dr. Florian Echtler, Dr. Jens Kersten)
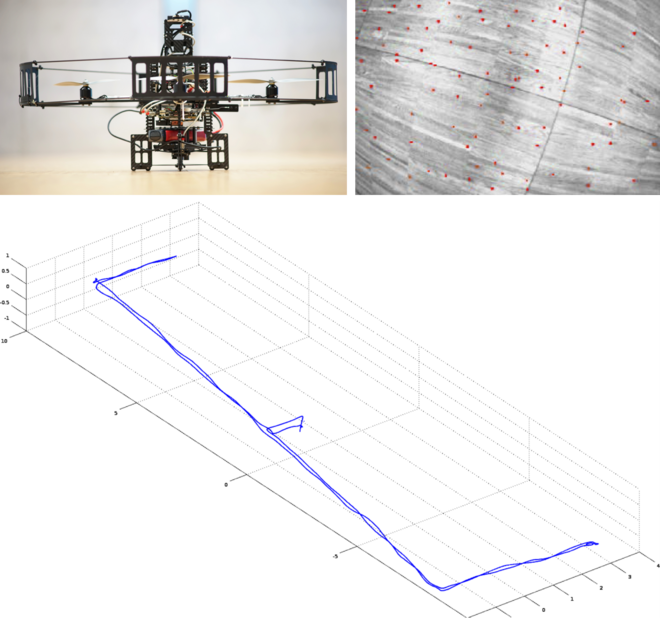
This bachelor thesis deals with the integration and evaluation of a position estimation using the extended Kalman filter for the navigation of unmanned aircraft systems (UAS) inside buildings. The sensors used for this are limited to a downward looking camera for visual odometry and the inertial measurement unit of the AscTec Pelican quadrocopter used. The data from these sensors are fused with the help of the Robot Operating System (ROS) on the quadrocopter's on-board computer and are used for its self-positioning.