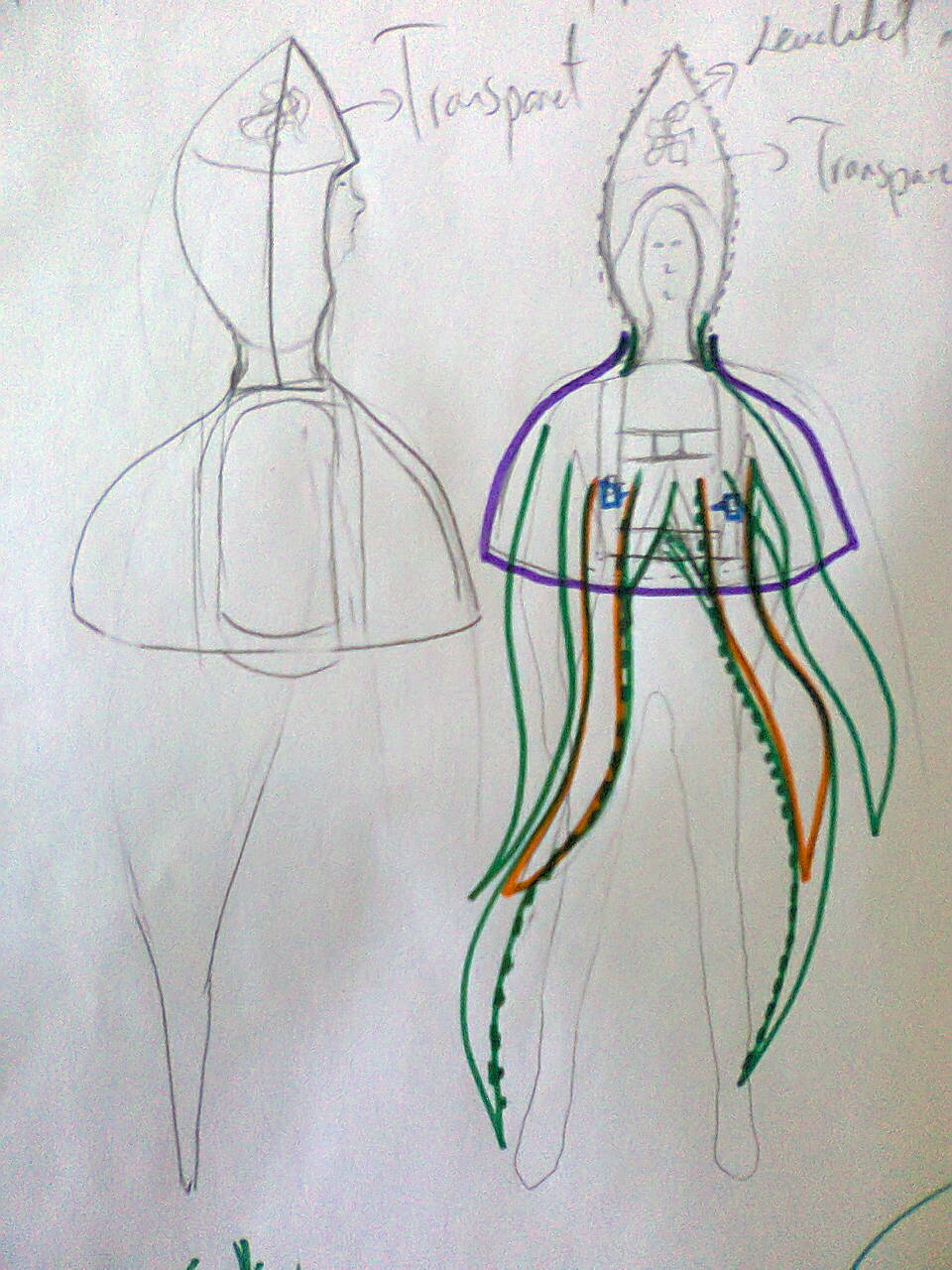
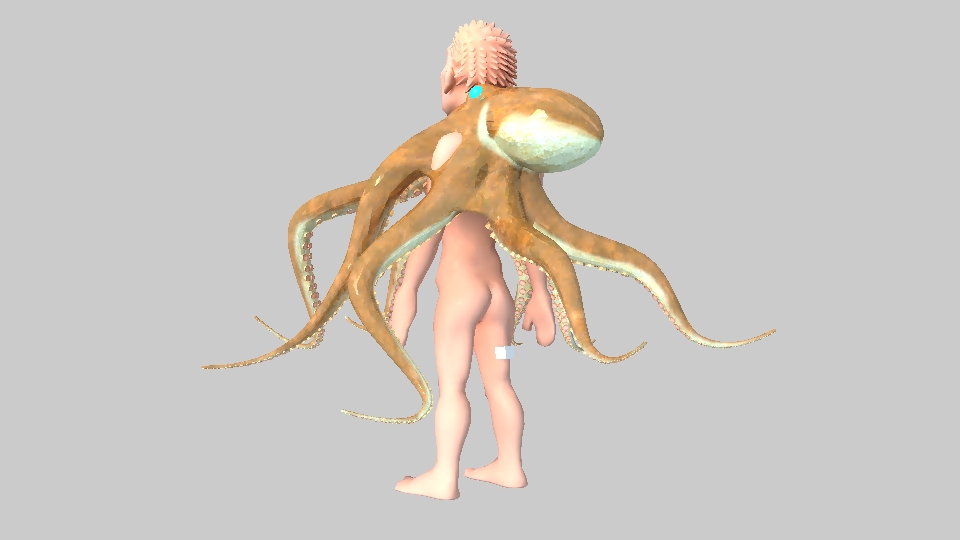
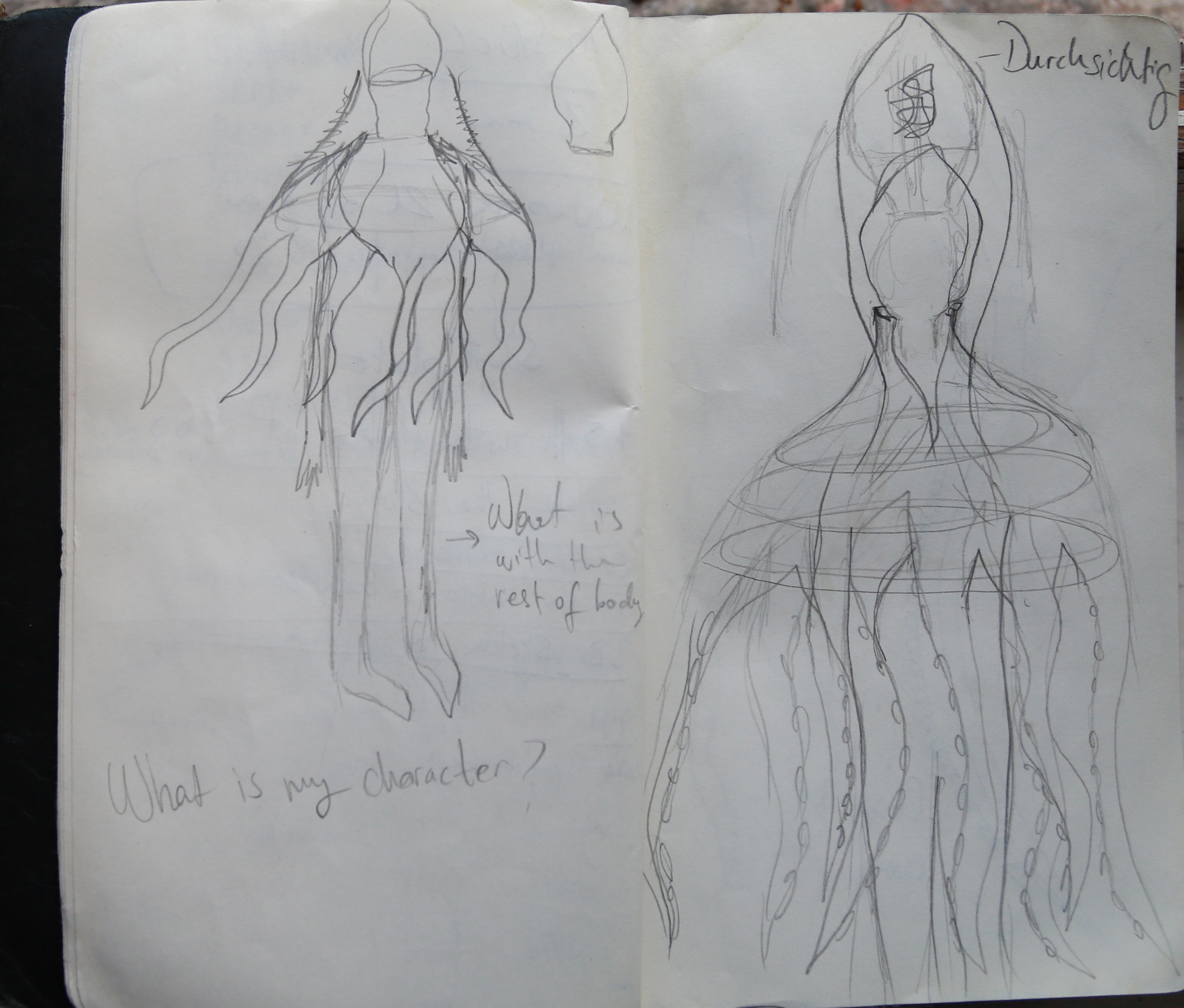
THE COSTUME WILL REFLECT THE CHARACTER WITH THE COLOR OF FABRIC AND STYLE OF THE COSTUME. ALTHOUGH IT IS AN UNDERSEA CREATURE, IT WILL BE A MECHANICAL ANIMAL COSTUME MIXED WITH HUMAN ASSOCIATION.
IT IS A DOMINANT CHARACTER, HE HAS POWER, VERY INTELLIGENT AND HE COULD BE DANGEROUS. THROUGH THESE CHARACTERISTICS THE COSTUME WILL TRY TO BE A CREATURE BETWEEN HUMAN AND ANIMAL.
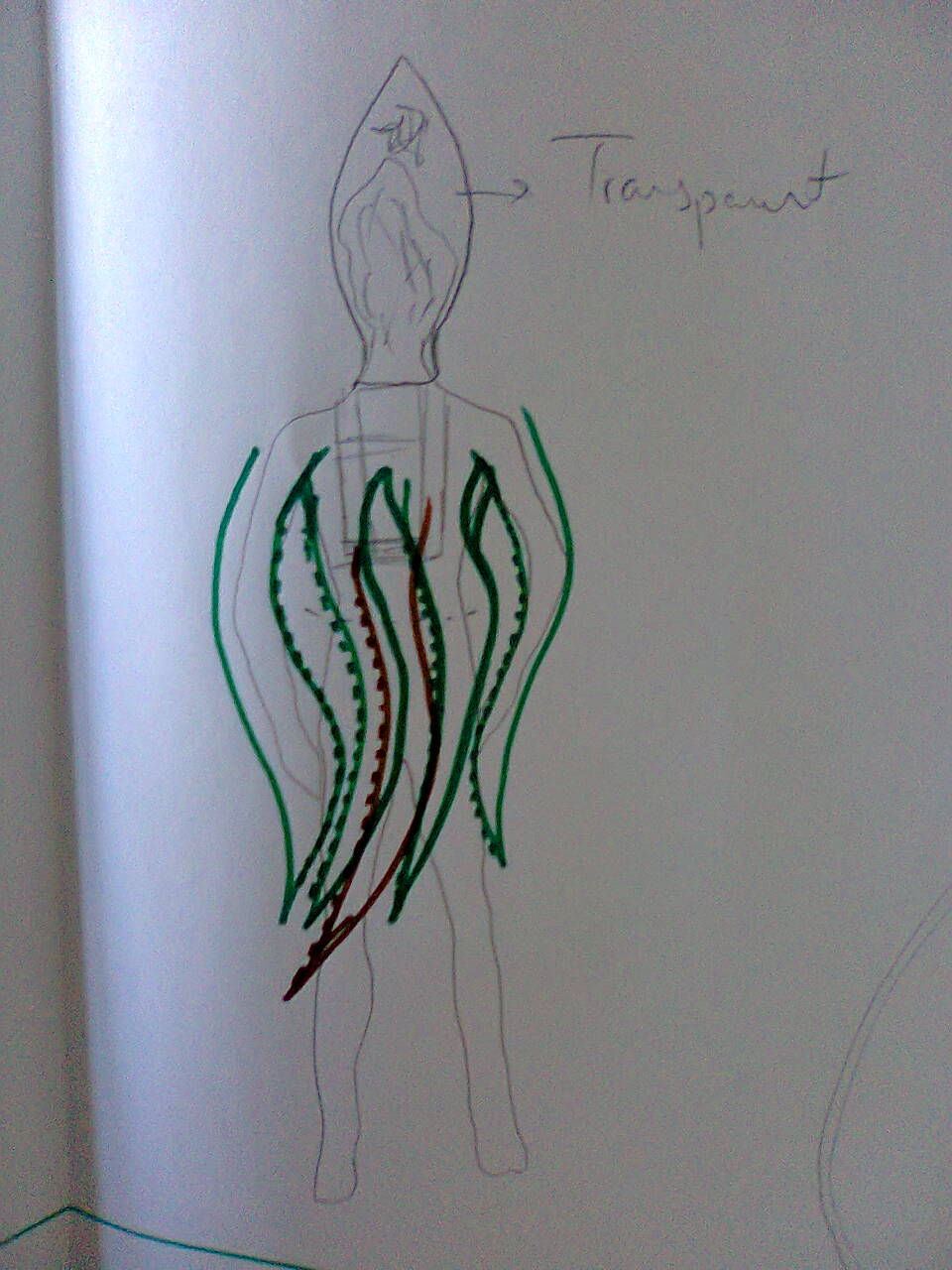
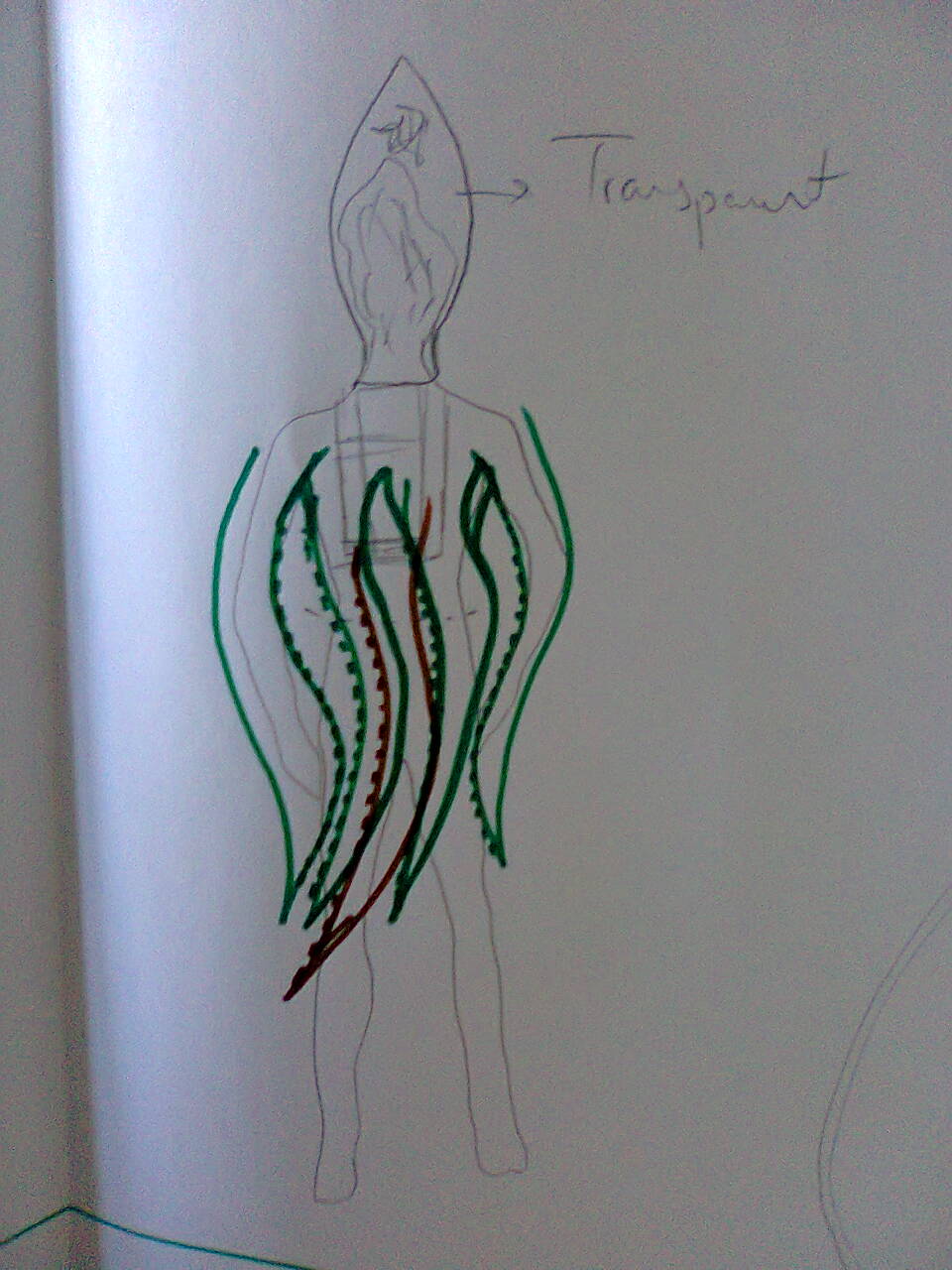
The octopus should have eight tentacles. The plan is to have four long tentacles at the back of the costume like a train. They won’t move. Another two hopefully will be move by motors (see The Octopus – Technical Design). But the actor will only control if they are on or off, because a controlled movement would be challenging the actor to much.
The actors arms will form the last two tentacles. They can be seen as “main” tentacles, since they will interacting with other actors/props etc.
Design of the Head
the transparent head made of thin plexiglass
this is heated with a machine and formed over a mold
the form will be molded from clay
this is then halved, because does not fit the entire form in the machine
then two half-molds are shaped
trimmed and glued together
then we have a transparent hat
Brain Form
In our design the brain indicates the mood of the octopus because it can not speak. We are planning to have a semi-transparent head with a colored, pulsating glow inside. Depending on the color and the pulse frequency the octopus is either calm (a slow pulse in green maybe) or excited (a fast pulse with red).
Because we must have a transparent head now, the brain also have a right brain structure. This is from a tube formed in these then come LEDs. With very high probability, an LED stripe will come down the tube. However, is still being tested if it is the perfect solution, because everything has to be right (the number of light duration, energy supply etc.).
Since the head is clear, now also a brilliant brain can enter it. This I imagined as follows.
The brain is composed of 1 to 3 meter Led-stripe, it have 60 Led´s per meter . The length is decided depending on the look . A brain -ike structure is applied and thus the length is decided .
We want to get an idea of the exact look of the brain when we build a brain example from 1cm thick tube .
( Pictures will follow )
The brain should be with a arduino controlled .
Depending on the mood of the Okopuses the color of the LED strip to be changed. So if the octopus is in a good mood is light up the brain green, less yellow and if he has quite a bad mood , it will glow red .
My first stop was the dimming of LED’s this I’ve found on the following page : http://arduino.cc/en/Tutorial/Fade
( Pictures will follow )
Next, I studied the wiring diagram for the LED ribbon this can be found on the following page:
We want to construct the head of the Octopus with a (semi)transparent illuminated brain part. Therefore we will use the following approach: some thin transparent plastic is heated and then pressed against a massive form. The result will be the half of the form pressed against the plastic disk. So we will have two halves,each of one side of the form.
We decided to take clay as material for the form. So here are some pictures of the result from a three hour pottery session of Dilek and me.
So our result will be a transparent plastic helmet, which we can then design. We are already sure that in the back of the helmet will be drilled many small holes to prevent the actor from sweating to death.
To move the two motorized tentacles I developed a proof of concept and on this basis two approaches to realize the movement.
A possible problem could be the weight of the tentacle, but since we have no real scaled tentacle yet, this is just a guess. An actual problem is the movement of the tentacle. If the soul torques to much we won’t get a nice movement, but a twisted mess.
Proof of Concept
Materials:
flexible tube (6mm)
flexible tube (10mm)
some wooden discs
steel cable
ground plane
(image will follow)
By pulling the steel cables the tentacle moves in the desired direction. The flexible tube torques to much so the movement is limited to a small percentage, until the tentacle twists. For that reason I was searching for other materials as soul for the tentacle. This prototype is not pretty but functional ;).
Approach 1 – Steel Cable
Materials:
steel cable 1 m
some wooden discs
Aramid fiber thread
cord strain relief grips.
(video will follow)
For this approach we used a 4 mm steel cable as soul for the octopus. Furthermore we replaced the flexible tube spacers by cord strain relief grips. The wooden discs have different sizes because we just used some leftover wood. But the result was still not perfect, because the steel cables torques to much.
Tentacle with Steel Cable as Soul – Smooth CurveTentacle with Steel Cable – Detail View
Approach 2 – Bicycle Chain Link
(video will follow)
aluminium bars 5.5 cm
some wooden discs
Aramid fiber thread
cord strain relief grips.
bicycle chain links
some screws and nuts M3
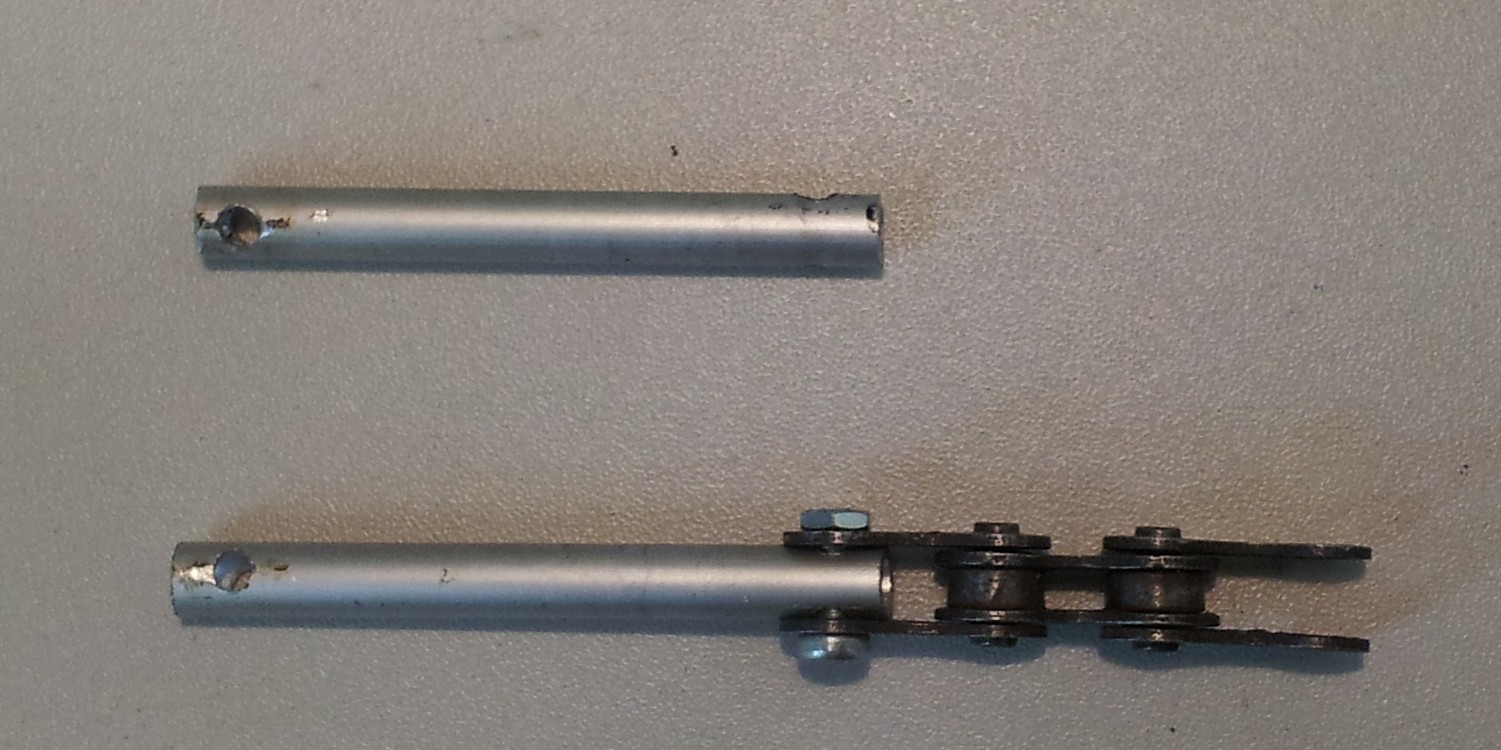
The next idea was to use bicycle chain links to avoid the torsion. Therefore I drilled two holes with 90 degree skew at both ends of a small aluminium pipe. Next I screwed small bicycle chain links to it.
The wooden discs with the cord strain relief grips were attached to the aluminium bar, followed by the next bicycle chain link.
Aluminium Bar with Bicycle Chain Link
The result looks promising:
Bicycle Chain Link Tentacle
But the movement was really disappointing. It was neither smooth curved nor naturally. In retrospect this result is logical. The single chain links have no resistance along the axes so they just move in an acute angle.
Acute Angle BendUnnatural Bend of the Bicycle Chain Link Tentacle
Complete bending results in a total mess:
Complete Bending of the Bicycle Chain Link Tentacle
Next I will go back to approach one. Since this approach creates a smooth curve, but torques to much the idea is to use a flexible shaft to reduce the torsion to a minimum.
Approach 1.5 – Flexible Shaft
Since the company GEMO sent us free samples of flexible shafts with a diameter of 4 mm and 5 mm we test them as soul for our tentacles. The results are quite good, so that we will use the flexible shafts and not the steel cable. The main advantage is that the flexible shafts have no twist and can’t torque. So a better controllable movement is possible.