Sebastian: yyy
Input ??? > Ein Holzstab mit einem Würstchen am Ende tippt auf den Bildschirm eines iPod. Dieser startet via Netzwerk (OSC) Musik auf einem Computer. Diese Musik wird durch den Sound-Ausgang des Computers in den Video-Eingang (Scart) eines Röhrenfernsehers geschickt. Auf dessen Schirm ist eine Photozelle angebracht, die auf die vom Fernseher ausgestrahlten Bilder reagiert. Ein Arduino verarbeitet die daraus resultierenden Werte und startet daraufhin einen elektrischen Heizlüfter. > Kerze ausgepustet (Temperatursensor)
Hannes: Analyse Helm
Input Brain Waves > > Output Fotoblitz
Philipp
Am Anfang war die Kugelbahn.
Die Kugelarretierung wird zwischen der Kugelbahn am oberen Ende befestigt um die Kugel in einer ruhenden Position zu halten.
Hier ist ein Draht an der Kugelarretierung fest installiert.
Der Draht führt zum Motor.
Der Motor ist an den Arduino ![]() angeschlossen.
Dreht sich der Motor kippt die Kugel aus der Arretierung und rollt die Kugelbahn hinunter.
angeschlossen.
Dreht sich der Motor kippt die Kugel aus der Arretierung und rollt die Kugelbahn hinunter.
Der Anfang der Immitation einer Rube Goldberg Maschine.
Zwei Hände (in diesem Fall von Julia) fangen die Kugel auf und weiter gehts.





Julia: Dokumentation
>Input:
Ich fange die Kugel von Philipps Projekt auf wodurch der EKG-Sensor an meinen Armen einen Impuls an den Arduino sendet: durch die Bewegung meines Armes wird ein Schwellenwert überschritten und aktiviert die PC-Lüfter.
Der entstehende Wind weht ein Spielzeugauto kontrolliert nach vorne.
Momentan aktiviert ein Schalter die Lüfter. Werde dann noch für die Endpräsentation den EKG-Sensor über das Arduino (ohne Processing dazwischen) mit den Lüftern in Verbindung bringen.
>Output:
Geplant ist, dass das Spielzeugauto die Infrarotschranke von Maschas Projekt durchfährt.

ekg-sensor

ekg-sensor-processing-moving

ventilator with button-circuit
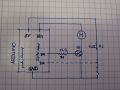
circuit for ventilator with button




Mascha
Input ??? > > Output ???
Georg
Input ??? > > Output ???
Eduard
Magnetische Levitation mit dem Arduino
Utensilien: ein Elektromagnet, ein Hall Sensor und ein Dauermagnet. Vorgehen: Der Dauermagnet wird mit dem Elektromagneten in einen Schwebezustand versetzt, während der Hall Sensor die Position des Dauermagneten ermittelt, mittels der Stärke des Magnetfeldes. Als einfacher Regelkreis wird dabei die Kraft des Elektromagneten so ausgeglichen, dass der Dauermagnet einen gleichbleibenden Abstand zum Dauermagneten behält und somit im Raum schwebt. Bei dem Dauermagneten kann es sich um eine Kugel handeln, welche von einer vorherigen Apparatur weggeschleudert oder in irgendeiner Form bewegt wird und damit als Output für die nächste Anordnung fungiert.
Daniel
Input > Photozelle Output > Hammerschlag E=mc²
Leo
Input ??? > > Output ???
Antje
Input ??? > > Output ???
Lukas
Input ??? > > Output ???
Martin: "aRobot"


Input 40 KHz Fernbedienung bzw. IR-Diode >
Geplant ist ein autonomer Roboter. Das Fahrgestell bildet ein Raupenantrieb mit zwei Getriebemotoren. Über einen Motortreiber können sowohl Richtung als auch Geschwindigkeit vom Arduino gesteuert werden.
Der aktuelle Prototyp verfügt über einen IR-Receiver, der Signale von einer Fernbedienung bzw. einer IR-Diode empfangen kann. Darüber werden Steuerbefehle an die Motoren weitergeleitet, so dass die Richtung des Roboters gesteuert werden kann.
Im nächsten Schritt sollen weitere Sensoren hinzugefügt werden, die es dem Roboter ermöglichen einer kontinuierlichen Linie zu folgen.
Als "Start" für den Roboter eignet sich somit ein beliebiges 40 kHz IR-Signal (dafür gibt es eine IR Remote Lib). Alternativ könnte auch ein lichtempfindlicher Sensor integriert oder eine Art Schalter angebracht werden, der bei Kontakt den Roboter startet.
> Output: Zur Fortführung der Kette kann ich beispielsweise etwas anstoßen oder etwas überfahren (Drucksensor). Es ist auch möglich eine LED mit einer bestimmten Farbe leuchten zu lassen (habe rot, grün, blau, gelb, weiß sowie RGB Leds) oder etwas wegzuziehen (zum Beispiel ein Hölzchen, dass eine Kugel hält usw.)
Ruben und Judith
Prototyp für interaktive Installation mit Arduino, Pure Data, Distanzsensor und Motoren:
In unserem Projekt entwickeln wir ein Interface, das als Prototyp für interaktive Installationen dienen soll. Der Besucher löst über einen Distanzsensor Motoren aus und setzt somit Objekte in Bewegung. Das Interface ist so konzipiert, dass die Anschlussmöglichkeiten nicht nur für Motoren genutzt werden können. Somit kann dieser Prototyp für kinetische oder auch akustische Installationen genutzt werden.
Dafür verwendet: Arduino Uno mit Standard Firmata Code 2.2. Pduino Objekt von Pure Data Extended Version Sharp Distanzsensor Darlington Array ULN 2003A 2 Codensatoren 100 μF, 50V 2 DC Motor, 6V
Als Input muss der Distanzsensor ausgelöst werden; Output bewegte Objekte (Gewicht an Schnur, siehe Foto)

Pduino Patch

Objekte an Motoren

Bewegung Detailansicht

Aufbau
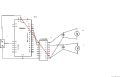
Schaltplan





Lu
Input ??? > > Output ???
Allon
Input ??? > > Output ???